
티스토리 뷰
Introduction
History
- 1970년대 영국 도로 연구소에서 자율주행 비디오 공개로 관심 얻음.
- 1980년대 다양한 대학들이 자율주행 연구 참여
- 2010년대 초, 차량 제조업체들이 참여 시작
Levels of Driving Automation

- 현재 수년동안 Level 2 에 머물고 있음
- 딥러닝의 발전으로 한계를 넘고 있음
- 딥러닝의 단점으로 문제도 있음 : the blackbox and inexplicable nature of neural networks
Research Trend

- 현재 분야 내 중요한 키워드들을 시각화 한 모습
- 중요한 Sub part
- Perception and Loacalization
- Motion Planning and Decision-making
- Simulators and Scenario generation
Architecture & System

- 순차적으로 엔지니어링 하는 Layer Architecture 와, Source data 에서 바로 주행 정책을 학습하는 End-to-End Architecture 가 있다.
Layer Architecture

- 세가지 레벨의 레이어로 나눌 수 있음
- Perception and Simultaneous localization an mapping
- to construct the environment map
- Planning
- navigating the vehicle
- Control layer
- calculates steering wheel angle, accelerator opening, brake force, and other signals
- Perception and Simultaneous localization an mapping
End-to-End architecture
- Learning driving policies directly from raw sensor data (e.g., images, point clouds, outputs brake, accelerator, and steering operations)
- Annotation 에 대한 요구가 적어 인기가 많아지고 있다.
- CNN, RNN, reinforcement learning 등을 기반으로 계속 연구되었음
- Appoach
- NVIDIA와 Comma AI는 엔드-투-엔드 딥 러닝을 사용한 무인 시연 시스템을 개발했습니다 (George et al., 2018) → 잘 안나옴
- (Chitta et al., 2021) proposed the neural attention field, NEAT
- BEV scene coordiinates 를 waypoint 와 semantic 정보로 매핑. 고차원 2D image feature를 사용해서 압축시키는것을 반복
- → 관련없는 정보를 무시하고 초점을 맞출 수 있음
- Sensor Data
- End-to-end 경우 Image 만 사용하는 경우 정확성 안정성이 떨어짐
- multi-modal 과 fusion of multiple sensors 를 기반으로한 end-to-end 모델도 연구된다
- 카메라와 라이다를 fusion 하여 사용할 시 더 우수한 성능을 보였음
- Approach
- (Prakash et al., 2021) used an attention mechanism to integrate image and LiDAR representations, and proposes a new multimodal fusion Transformer
- Transformer 의 self-attention 메커니즘으로 다른 modality 의 feature extraction layer 와 fuse 하고 정보를 통합하여 사용한다
Comparison

- Layer
- 장점 : modular design and reliability.
- 단점 : increased complexity and the possibility of delays in system responses
- End-to-End
- 장점 : enhancing efficiency by processing input data through a single neural network that outputs control commands directly
- 단점 : cost of a heavy reliance on the quality of the training data and challenges in understanding how the system makes decisions
Technology

Scene Perception and Localization
- ML 기술 기반으로 환경을 인식하고 공간을 정의함
- Sensor data 를 사용하는 기술들이 주로 연구됨

Sensor
- Camera / Lider / Rader
- 3가지가 주로 쓰임
- Camera
- Detail 한 질감과 색상의 미묘한 차이를 해석할 수 있음
- Lane Detection 과 Traffic Sign Recognition 등 에 필수적임
- 고해상도 이미지를 처리할 때 Computing resource를 많이 써야함
- Lidar
- 탐지 정밀성이 좋음
- Obstacle avoidence / Pedestrian detection 등에 좋음
- 기상조건, 무게, 고비용 등의 단점이 있음
- Rader
- 광범위한 시야와 먼 거리에서 객체 감지 가능
- Adaptive Cruise control, Blind spot warning 등에 쓰임
- 라이다보다 낮은 Spatial resolution, Angular accuracy
Object Detection
- 주변 환경을 이해하는데 기반이 되는 객체 탐지 기술
- 목적
- 물체들을 식별, 분류, 위치를 파악하는 것
- 최신 AI 알고리즘들이 주로 적용됨
- Image Object Detection
- Region-based CNN
- two-step process : region proposal and refinement
- Faster RCNN 과 RPN 을 활용한 Attention based framework 가 고해상도에서 작은 객체 감지에 좋은 성능 보임

- Single-stage detection (YOLO / SSD)
- 빠르기 때문에 동적 상황에 대응하는 Real-time 감지에 유리
- approach
- Complex-YOLO 는 Lidar 내에서 3D 객체를 감지하는데 최적화 됨
- SSD는 다양한 스케일을 가지고 있어 다양한 크기의 객체 감지가 가능하며, 속도가 중요할 때 많이 쓰이고 있음
- Region-based CNN
- Point Cloud Object Detection
- spatial coordinates and attributes such as color or intensity 같은 속성들이 포함되어 있어 풍부한 정보를 제공함

- Point-based
- Voxel-based
- 2D-Projection-based
- spatial coordinates and attributes such as color or intensity 같은 속성들이 포함되어 있어 풍부한 정보를 제공함
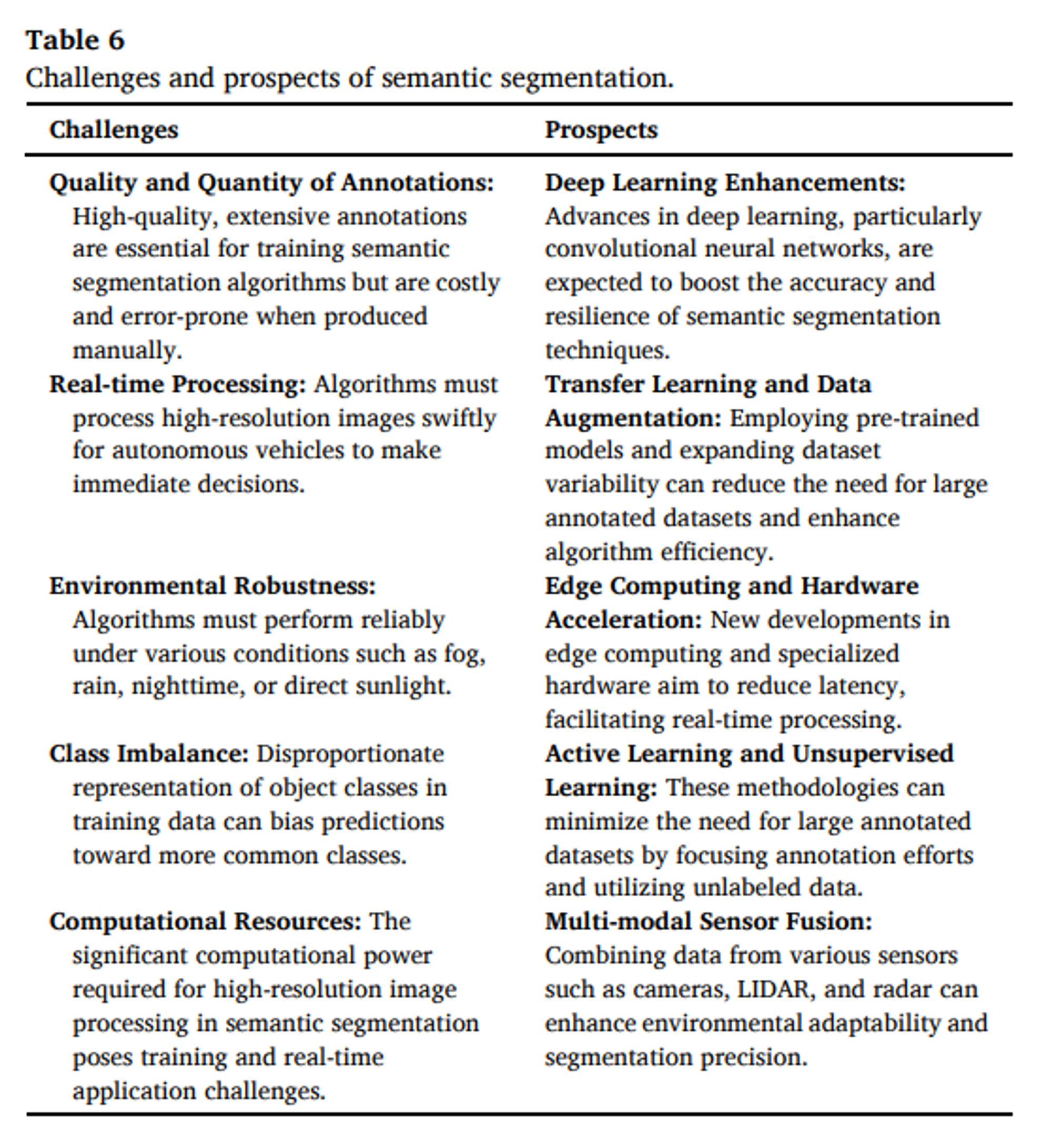
Semantic Segmentation
- pixel level 에서 환경 인식
- 주석 작업 하는게 어려움
- Architecure
- 이전에 Fully Convolutional Network 기반으로 시작됨
- VGG16 같은 Classification Network를 변형하여 “Encoder” 로 만들어서 사용
- 낮은 resolution 의 feature map 을 픽셀단위 예측에 사용하기 위해 “Decoder” 사용
- Ex)
- SegNet (Badrinarayanan et al., 2017) - VGG 기반으로 인코더 디코더 사용. 좋은 성능
- 다양한 공간 스케일에서 local detail 과 global context 를 균형있게 활용하기 위해 사용하는 방법들
- CRF
- Dilated Convolutions
- RNNs
- 자율주행에서 환경 데이터 추출 및 해석에 필수적인 도구로 사용됨
- 복잡하고 도전과제가 많지만 잠재력이 많음
Multi-Object Tracking
- 주변에서 일어나는 상황을 보고 추적하고, 주변 환경의 상세한 지도를 동시에 구축할 수 있도록 함
- 여러 객체를 감지하고 고유한 식별 정보를 유지하여 지속적으로 업데이트
- Tracking Approach
- Online Tracking
- image frame 을 step-by-step 으로 신속하게 처리
- Offline Tracking
- 전체 데이터를 한번에 분석해 정확하게
- Online Tracking
- Object detection 기반으로 추적 알고리즘을 사용함
- Data association match
- 연속적인 프레임에서 객체들을 매치
- Hungarian algorithm, joint probablistic data associataion
- Kalman Filter, Particle Filters
- 자율주행을 매끄럽게 잘 돌아가게 하는 기술
Localization an Mapping
- GNSS나 IoV와 같은 기존 위치 결정 시스템의 한계를 넘어서 SLAM 기술을 통해 위치추정과 Mapping 에 사용함
- Visual SLAM
- Visual Odometry, back-end, loop closure detection, mapping 으로 구성되어 있음
- …추후 추가…

Motion Planning and Decesion-Making
- Motion planning
- 출발지에서 목적지까지의 최적의 경로를 찾는 과정
- Decision-making
- 실시간 환경 인식, 센서 및 규칙에 따라 동적 교통 상황에 대응할 수 있게 하는 것
- Path planning, trajectory prediction, behavior arbitration 등의 요소들이 딥러닝 방법론으로 큰 향상을 겪었음
- 환경에 적응하고 미래 경로 행동을 예측하기 위해서는 인간처럼 생각할 필요가 있다.
- AI 를 사용하여 Flexibility 와 AdaptablilTity 얻음
Trajectory prediction
- Generative model
- 생성 모델을 사용하여 trajectory prediction(궤적 예측) 에 사용
- 인코더, 디코더 프레임워크, GAN 등을 활용함
- 생성 모델을 사용하여 trajectory prediction(궤적 예측) 에 사용
- GNN base method를 사용하여 순차적인 정보를 예측함
- Multi-modal 로 RNN 과 Deep Reinforcement Learning 을 결합해 예측 전략에 사용함
- ex) (Cai et al., 2019; Gao et al., 2018) - 카메라 이미지, 고수준 명령 및 자율 주행의 이전 궤적을 수신하고 3 초 후에 충돌하지 않는 궤적을 출력하기 위해 학습하는 CIL 엔드 투 엔드 모델
Decision-making
- AI logic-based approach
- The rule-based reasoning algorithm (expert system)
- 큰 문제를 여러 작은 문재로 변환하여 사용, 명확한 의미가 있음
- 단점 : 다수의 규칙을 디자인해야 하고 계산 시간이 길며, 전문가의 지도가 필요함
- Final State Machine(FSM)
- 환경의 변화에 따라 trigger 되는 상태 및 상태간 전이를 나타냄
- 간단하고 제어 가능하고 복잡한 관계를 설명할 수 있음.
- 단점 : 결정론 적이기 때문에 unknown situation 에 대한 일반화를 할 수 없음
- Decision Tree
- 전략을 체계적으로 나열하여 특정 시나리오(ex: 보행자 행동 예측) 에 사용하기 좋음
- partially observable markov decision process (POMDP)
- 동적이고 불확실한 환경을 다룰때 사용됨
- perception 과 planning 사이를 수학적으로 탄탄하게 연결할 수 있음
- 어떤 방법을 사용할지는 주행 환경이 얼마나 복잡하고 예측하기 어려운지에 따라 달라진다.
- The rule-based reasoning algorithm (expert system)
- AI heuristic algorithms
- 상태 공간을 그래프로 이산화하고, 각 문제에 따른 최적화 문제의 솔루션으로 사용함
- SVM 등을 사용할 수 있음
- MetaHeuristic 알고리즘을 사용할 수 있음
- Reinforcement Learning
- motion planning 에서 큰 인기를 얻고 있음
- Approach
- 모델 구성 : 동적 환경을 모델링하고 보상함수를 구성해 누적 보상을 극대화 하려고 함
- 모델 없는 방법 : 미리 정의된 모델 없이 환경과의 상호작용으로 학습
Simulator & scenario generation
— 추후 추가 —
Current Chanllenges and Limitations
- 각 시스템을 발전시키는 것 뿐 아니라, 복잡한 서브시스템을 매끄럽게 통합해야한다.
Challenges
- 높은 안전 기준
- 실시간으로 완벽하게 동작해야하며 완벽하게 작동해야한다.
- 도시 환경의 복잡성
- 높은 밀도의 동적이고 예측할 수 없는 요소들이 많음
- 복잡한 도시 교통 때문에 규제 및 인프라도 중요
- Robust Performance in Adverse Weather
- 악천후에서도 견고한 성능이 유지되어야 함
- Dynamic and Unpredictable Scenarios
- 공사구역 통과 또는 갑작스런 장애물 같이 예상하지 못한 부분 및 윤리적 고려
- Interpreting and Reacting to Human Behavior
- 사람의 행동과 의도를 이해해야함. 문화와 사회적 규범에 따라 크게 다를 수 있음
- Ethical Concerns (윤리적 우려사항)
- 도덕적 딜레마 등 윤리적 원칙
- 법률 및 규제 프레임워크
- 개인정보 보호 등 민감한 정보 고려
- High-Definition Mapping and Localization
- 고정밀 지도를 최신상태로 유지하고 업데이트 해야하는데 드는 자원
- Cybersecurity
- 해킹등의 위험
- 공공 신뢰 얻기
Future Direction
- 어떻게 자율주행 시스템을 발전시켜 나갈 수 있을것인가
- Tech Innovation Growth:
- 센서기술, 인공지능, 처리능력 및 네트워크 의 발전을 통해 정교해질 것이다.
- VR, AR 등은 시뮬레이션을 만드는데 도움이 될 것이다.
- 안전에 대한 패러다임 제고
- 인간 관련 문제로 발생하는 사고들을 줄이고 일관적이고 안전한 도로 주행 문화를 만들어 나갈 수 있을 것이다
- 교통 흐름 최적화
- 차량간 통신을 통해 교통 흐름을 최적화 하는 시스템을 만들 수 있을 것이다
- 모빌리티와 접근성 향상
- 장애인 노인들과 같이 운전이 어려운 사람들도 자율주행을 통해서 탑승할 수 있다.
- 환경 친화적 교통 촉진
- 최적의 효율성을 가지고 전기자동차를 사용, 또한 공유 모빌리티등으로 사용되어 차량 수를 줄일 수 있다.
- 물류 및 배송 서비스 변혁
- Smart city 인프라 와의 동기화
- 제도와 법적 구조 방향
- 대중들과 함께 신뢰를 쌓으며 나아가기
Reference
- A Survey of Deep Learning Techniques for Autonomous Driving
- 2020
- Autonomous driving system: A comprehensive survey
- 2023
-
- 2023
댓글